| Lundi 22 Septembre 2008 Des infos au bout des doigts Moustapha Hafez CEA LIST - Fontenay |
 |
 |
| Lundi 22 Septembre 2008 Des infos au bout des doigts Moustapha Hafez CEA LIST - Fontenay |
|
|
Les chercheurs du CEA LIST développent des interfaces sensorielles capables de transmettre au bout des doigts d’un utilisateur des informations tactiles : forme, rugosité, texture, échanges thermiques ou chimiques. Associées aux technologies de réalité virtuelle ou de téléopération, elles permettent de simuler ou de reproduire les sensations du toucher comme si l’utilisateur avait réellement les objets dans ses mains : la précision du ressenti est alors primordiale (cas des applications comme la chirurgie robotisée ou les manipulations en milieu hostile). De telles interfaces peuvent aussi être utilisées comme support d’information, par exemple dans le domaine des télécommunications (téléphones portables...) ou de l’automobile, mais aussi pour l’assistance aux personnes handicapées, les informations par le toucher aidant à compenser le handicap. Les chercheurs du LIS vous feront découvrir les performances actuelles et les applications de demain de ces interfaces dites tactiles. Avec Moustapha Hafez, José Lozada et Samuel Roselier spécialistes des interfaces tactiles au Laboratoire Interfaces Sensorielles (LIS) du CEA LIST de Fontenay-aux- Roses.
Introduction Pour ce qui est de l'Homme, on lui attribue usuellement cinq sens qui sont l'odorat, la vue, le toucher, l'ouïe et le goût. En réalité, le système sensitif de l'Homme est beaucoup plus complexe. Au vu de cette complexité, du nombre et de la diversité des capteurs biologiques impliqués, la classification simpliste en cinq sens paraît, de nos jours, désuète. Un sens qui nous intéresse tout particulièrement est le sens Haptique. Le sens haptique est considéré comme étant un sens actif. Sa mise en œuvre est obligatoirement issue d’une interaction physique (contact) avec l’environnement. Le fonctionnement perceptif haptique est extrêmement associé à la fonction motrice chez l'être humain et a des caractéristiques particulières qui le distinguent. Celui-ci est par exemple différent de la vision ou de l'audition où le prélèvement d’information ne modifie pas physiquement son support. La perception haptique met en jeu un phénomène complexe et encore mal compris d’échange de paramètres de natures physiques diverses entre l’homme et les objets de son environnement. La modalité haptique humaine comporte à la fois la kinesthésie et le tactile. Les frontières, si bien physiologiques que psychophysiques, ne sont d'ailleurs pas très clairement établies (voir Fig.1). Il s’agira de kinesthésie quand l’information obtenue (prélevée) est issue des stimulations durant une contrainte sur le mouvement ou quand une force externe est appliquée. Alors qu'il s’agira de tact ou de tactile quand l’information est le résultat des stimulations issues d'un contact fin, précis ou léger de la peau avec diverses matières. On utilise parfois le terme de somesthésie pour désigner l'ensemble des sensations "conscientes" issues du "soma", c'est-à-dire du corps, à l'exception des sensations venant des récepteurs visuels, auditifs, gustatifs et olfactifs. Il s'agit là aussi non seulement du toucher mais aussi de la température et/ou de la douleur. Il est à noter que le résultat assez impressionnant de la fluidité et de la précision des mouvements chez l'homme nécessite la bonne coordination des deux processus (kinesthésique et tactile).
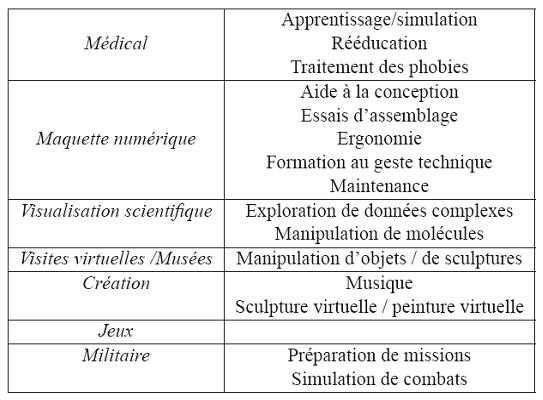
L'apparition des techniques de réalité virtuelle, offrent à l'homme la possibilité, dans différentes applications, d'interagir avec des mondes synthétiques i.e. des environnements virtuels générés par ordinateur. Les ingénieurs ont déjà réglé le problème d’immersions visuelle et auditive grâce respectivement aux techniques d'infographie et de la technologie du son 3D, moyennant de nouvelles interfaces matérielles. On commence à peine à intégrer le sens haptique comme modalité à part entière au sein d'environnements virtuels. Il s'agit d'offrir à l'homme la possibilité d'interagir complètement avec des objets virtuels. Si des solutions pour ce qui relèvent du retour kinesthésique (contraindre le mouvement de l'opérateur humain) se dessinent, il n'en est pas de même pour le retour tactile. Pourtant, l’importance de ce dernier est évidente lorsqu'il s'agit de connaître la rugosité, la dureté, la température, etc. Il y a un grand besoin de dextérité dans le geste, de rapidité et de précision d’exécution pour différents systèmes de télé-opération, de télé-présence et de réalité virtuelle. Ceci afin de permettre à l'opérateur "de sentir" l'environnement comme s'il était "présent" dans la zone d'exécution de la tâche. Une transparence idéale implique que l'opérateur ne sente une information de toucher que quand le contact est établi. Or, les diverses interfaces disponibles actuellement compromettent cette transparence idéale car elles sont, soit portées ou tenues par l'opérateur, ce qui implique un contact permanent. On peut lister les différentes applications existantes, faisant appel à des interfaces haptiques, portables ou non, en les classant par domaine d’utilisation (Tab. 1). On ne présentera ici que quelques exemples “pertinents” d’applications.
2 - Interfaces sensorielles pour les déficients visuels Comment permettre
aux aveugles et déficients visuels d’accéder à
l’information ? La vue représente chez les voyants un canal
sensoriel primordial pour capter des informations. Au réveil,
le premier réflexe d’une personne voyante mais portant
des lunettes ou des lentilles de contact n’est-il pas de chercher
son appareil correctif ? La vue nous sert dans la vie de tous les jours
pour repérer des obstacles, s’orienter ou s’instruire
en accomplissant un acte si simple : lire. De nombreux dispositifs ont
été pensés et conçus pour se substituer
à la vue chez les aveugles. Ces dispositifs utilisent donc les
4 canaux sensoriels restants, principalement l’ouïe, mais
aussi le toucher et dans une moindre mesure, le goût et l’odorat.
C’est
alors que le sens du toucher peut leur venir en aide. Certaines utilisations
du toucher sont déjà très répandues, la
canne blanche est par exemple un dispositif haptique d’aide à
la déambulation pour les aveugles, permettant de détecter
le profil du sol et les obstacles dans un rayon proche de son utilisateur.
Des reliefs au sol sur les passages pour piétons ou dans le métro
sont d’ailleurs volontairement placés pour leur donner
des repères. Ces deux exemples montrent bien l’intérêt de l’utilisation du toucher chez les aveugles et déficients visuels pour la communiquer, explorer, s’orienter… De plus, le toucher est en général très peu sollicité lors de tâches courantes, lorsque l’on marche ou parle par exemple. Le CEA LIST a développé plusieurs dispositifs d’assistance, un premier dispositif consiste en une interface tactile appelée « VITAL » (voir Figure 3) ayant pour objectif de faciliter l’accès aux contenus numériques tels que des graphiques ou des cartes. Un second développement est une interface haptique embarquée, appelé « ViFlex » (voir Figure 4), qui a pour vocation de guider et d’orienter les aveugles dans leurs déplacements.
3 - Interfaces sensorielles pour le divertissement – Cas du piano La réponse
dynamique de la mécanique d’actionnement traditionnelle
de piano est responsable du toucher procuré par le clavier. Cette
information sensorielle est précieuse pour le contrôle
fin de la nuance de jeu. Or, les claviers numériques ne sont
pas équipés avec le même système d’actionnement.
Les substitutions, souvent passives, ne reproduisent pas de manière
satisfaisante le comportement traditionnel et a fortiori le rendu sensoriel.
VIDEO de la conférence |